STS Crane
Control system design for container gantry cranes
Modern container terminals are central hubs in the global supply chain, with ever-increasing demands for high handling capacities. One example is the port of Shanghai, which has tripled its container traffic from 14,557 TEU in 2004 to 47,303 TEU in 2022.
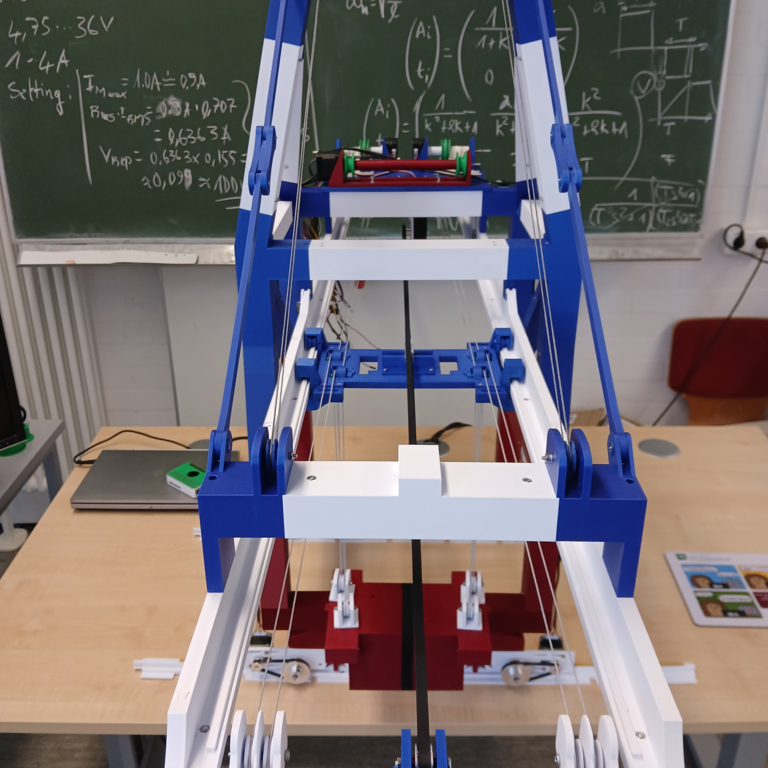
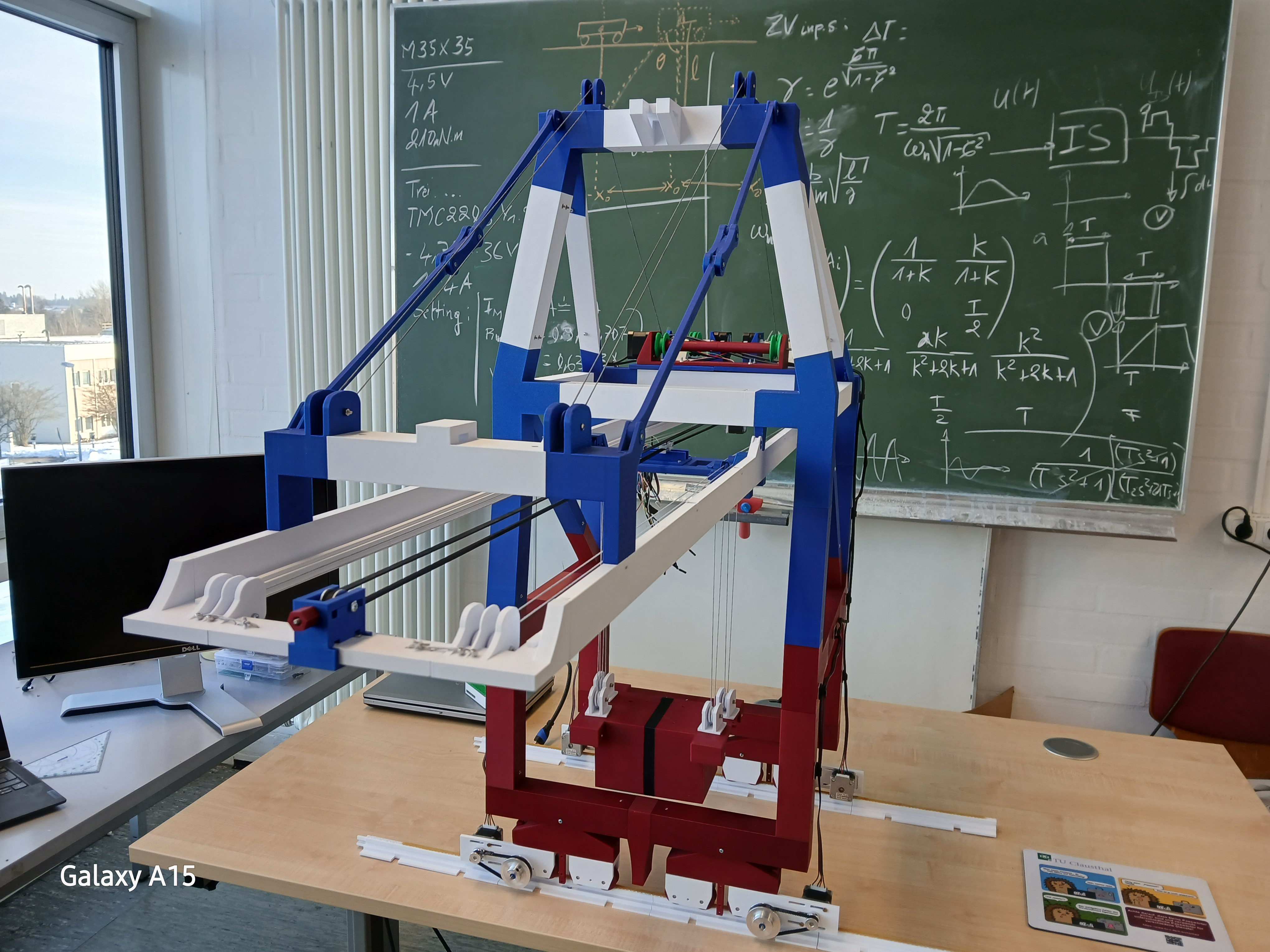
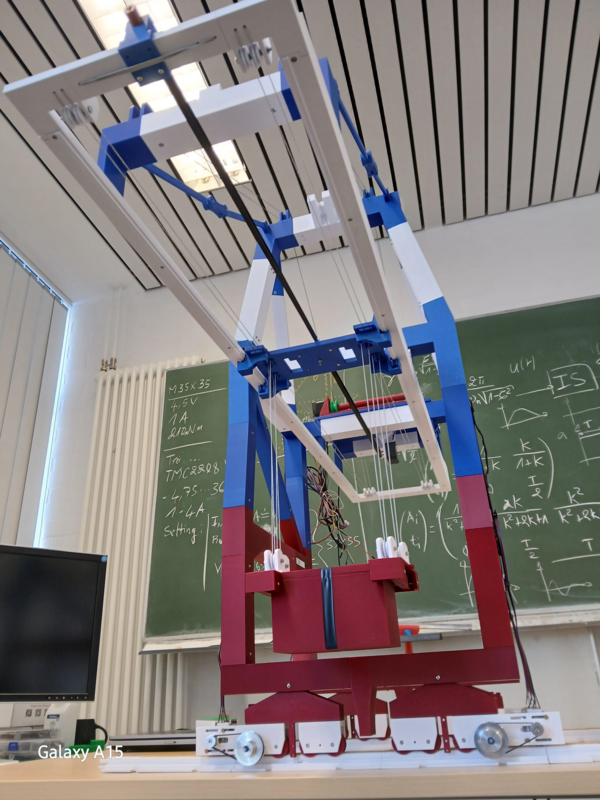
A key element of container handling are container gantry cranes or ship-to-shore cranes (STS cranes), which load and unload container ships. Performance limitations of these cranes can lead to bottlenecks and slow down terminal operations. In addition, safety requirements for STS cranes are becoming increasingly important, as accidents are often devastating. Examples include the fatal chlorine gas accident in Aqaba in 2022 and the collapse of a crane after a collision with a ship in Antwerp in 2019.
New assistance systems are therefore being introduced in many places in order to meet performance and safety requirements. However, full automation is difficult, as container handling remains complex due to limited visibility in the ship and twistlocks. Current automation solutions can therefore only offer partial solutions and often consist of different systems from different providers. A formal analysis of the safety and availability achieved by such a system is therefore generally difficult. To solve this problem, formal methods for safety-certified control design are therefore developed, which also guarantee the achievement of a desired behavior.